
محققان دانشگاه هاروارد موفق به طراحی و ساخت بازوی رباتیک نرمیشدهاند که از لحاظ ظاهری و عملکرد، شباهت بسیار زیادی به بازوهای یک هشتپا دارد.
این دستاورد بزرگ میتواند زمینهساز توسعه و پیشرفت بیشتر در حوزه رباتیک نرم باشد. در واقع، دنیای رباتیک مملو از ایدهها و طرحهای نوآورانهایست که هرکدام از آنها میتوانند در صورت تولید و عرضه به بازار، راحتی بیشتری را برای ما انسانها به دنبال داشته باشند.
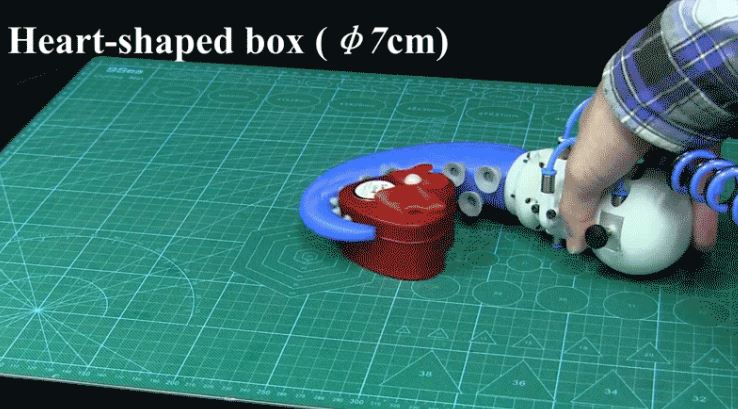
در همین زمینه، محققان اخیرا تلاش کردهاند تا با الهام از طبیعت و موجوداتی که در آن زندگی میکنند، رباتهایی را طراحی کنند که جدیدترین نمونه آن، بازوی رباتیکی است که همانند بازوی یک هشتپای واقعی عمل میکند. این دستاورد میتواند به راحتی دور هر جسمیکه اطراف خود میبیند، بپیچد و حتی میتواند درب یک شیشه مربا را نیز باز کند.
این بازوی رباتیک که با همکاری گروه از محققان دانشگاههاروارد و همچنین دانشگاه بیهانگ چین ساخته شده، Festo Tentacle Gripper نام دارد و به لطف ساختار نرمیکه از آن بهره میبرد، قادر است هر جسمیرا بردارد.
این بازو از طراحی مخروطیشکل برخوردار است و همانند بازوی یک هشتپای واقعی، از خاصیت مکش بهره میبرد. در دل این بازو، از دو لوله استفاده شده که یکی برای فشار آوردن به بازو برای جمع شدن و دیگری برای اضافه کردن قابل مکش تعبیه شده است.
ناگفته نماند که پیشرفتهای اخیر در زمینه علم رباتیک، نگرانیهایی را نیز برای محققان و به طور کل، انسانها بوجود آورده است. به اعتقاد این افراد، رباتها با سرعت فراینده و غیرقابل مهاری در حال پیشرفت هستند و اگر این رویه تحت کنترل نباشد، میتواند به تهدیدی جدی برای بشریت تبدیل شود. برای مثال، این رباتها اکنون بخش زیادی از فعالیتها در کارخانجات و صنایع مختلف را بر عهده دارند و پیشبینی میشود که در آینده نزدیک، دیگر شغلی برای انسانها باقی نخواهند گذاشت.
عالیه فکر خوبیه، اگه بع تولید انبوه برسه عالی می شه